Cuando en el instituto (y en gran parte de la Universidad) hemos trabajado con vectores, siempre nos hemos limitado en su estudio a $\mathbb{R}^n$ como espacio vectorial. Fijémonos en el caso bidimensional para afianzar conceptos. Dotando a $\mathbb{R}^2$ de una estructura de espacio vectorial sobre el cuerpo de los números reales (mediante una operación de suma y otra de producto adecuadas), podemos tomar la base canónica en el plano con la cual podemos construir cualquier otro vector:
 |
$\mathbb{R}^2$ como espacio vectorial siempre admite una base: todo vector de $\mathbb{R}^2$ puede escribirse como combinación lineal única de los elementos de la base. Por ejemplo, el vector $v$ (en verde) puede escribirse como $4e_x + 3 e_y$.
|
Podemos incluso ir más allá y no sólo considerar vectores en un punto, si no vectores en todos los puntos, es decir, campos vectoriales. En el caso plano sigue resultando cierto que existe una base global de campos vectoriales, y que por tanto todo campo vectorial puede escribirse como combinación lineal única de dichos vectores. Los coeficientes de la descomposición (en vulgo, las coordenadas) ya no son números reales, si no que son números reales punto a punto, es decir, funciones. Más adelante profundizaremos en las implicaciones que tiene esto.
 |
En este caso, el campo vectorial $v$ define un vector en cada punto del plano. La base de campos vectoriales $e_x$ y $e_y$ está bien definida globalmente. La descomposición de $v$ en la base es única punto a punto. Es importante no confundir $\mathbb{R}^2$ como variedad con su espacio tangente, aunque sea algo a lo que estemos acostumbrados. Existe un isomorfismo entre ambos.
|
Pero el plano es un caso muy particular, poco interesante y una imagen nada realista de las superficies cotidianas que nos rodean. Es interesante, por tanto, estudiar otras variedades no planas, tales como esferas, toros y demás. No vamos a entrar en profundidad en las propiedades topológicas y geométricas de estos entes, pero daremos por supuesto que el plano y la (superficie de la) esfera no son en absoluto parecidos. Sin embargo, un huevo y una esfera se parecen un poco más. Matemáticamente esta relación se puede entender con ayuda de los isomorfismos topológicos (también llamados homeomorfismos). Diremos que dos espacios topológicos son homeomorfos, que a ojos de la topología viene a decir que son casi el mismo, si existe una biyección continua y con inversa continua entre ambos espacios. Entre una esfera y un huevo tal aplicación existe, pues podemos deformar uno en el otro (y viceversa) de forma continua. Entre el plano y la esfera no. Como digo, la topología sólo es capaz de distinguir las clases de equivalencia bajo homeomorfismos.
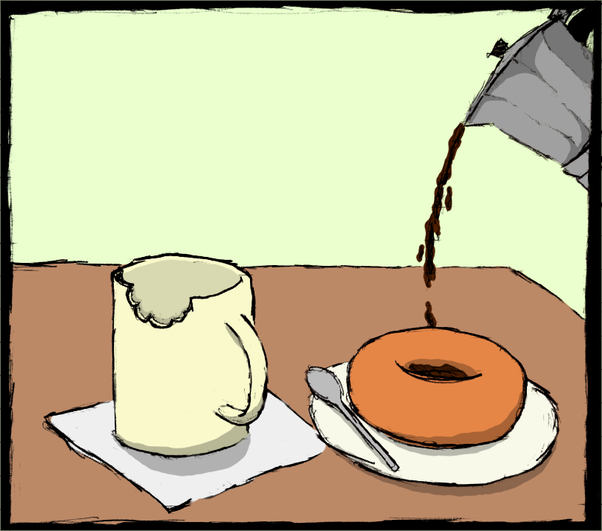 |
Un doctor en topología, cuando desayuna, tiene problemas como éste. A ojos de la topología, la taza y el dónut son equivalentes, pues existe un homeomorfismo entre ambos espacios topológicos.
|
Como digo, no entraremos en materia avanzada sobre geometría diferencial, pero hay una idea que tiene que quedar clara: sobre la esfera, o cualquier otra variedad no necesariamente bidimensional, también podemos construir vectores y campos de vectores. La idea es que punto a punto podemos construir un espacio vectorial denominado espacio tangente.
 |
Podemos visualizar el espacio tangente a la esfera en el punto $p$ vista desde $R^3$. Dicho espacio puede dotarse de una estructura de espacio vectorial, de modo que podemos construir vectores punto a punto sobre la esfera.
|
De igual modo a lo que hicimos en el plano, podemos tratar de construir campos vectoriales sobre la esfera. Formalmente, los campos vectoriales son secciones del fibrado tangente de la variedad. Pero sin entrar de momento en mucho detalle, los podemos imaginar visualmente.
 |
El campo vectorial (en rojo) define un vector en cada punto de la esfera. Dicho vector vive en el espacio tangente a la esfera en dicho punto.
|
Pero ahora surge una diferencia radical con respecto al caso plano. En la esfera no podemos encontrar una base global de campos vectoriales. Dicho de otro modo, es imposible encontrar un campo vectorial sobre la esfera que no se anule en algún punto sobre la misma. Este resultado se conoce como el Teorema de la bola de pelo (Hairy ball theorem en inglés) y fue demostrado por Poincaré en 1885 para la 2-esfera. Más tarde se generalizó para dimensión arbitraria. Podéis encontrar una demostración al teorema en el siguiente enlace. En ella se asume la existencia de un campo vectorial sobre $S^2$ que no se anula en ningún punto y se llega a una contradicción. Emplea los conceptos de homotopía de curvas y de índice (winding number).
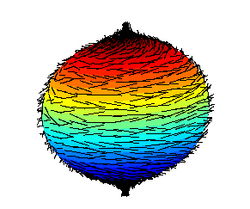 |
Como se observa, este campo de vectores se anula en los polos, motivo por el que se conoce este resultado como que "no es posible peinar una esfera".
|
Sin embargo, existen otras variedades no planas que sí se pueden peinar, como es el caso del toro. Cuando una variedad admita una base global de campos vectoriales, diremos que dicha variedad es paralelizable. Como veremos, cuando esto ocurre, el fibrado tangente es trivial.
 |
Este campo de vectores sobre el toro no se anula en ningún punto. Existe por tanto una base global de campos vectoriales sobre el toro.
|
¿Qué está sucediendo aquí? ¿Por qué hay variedades que se pueden peinar y otras que no? Dicho de otro modo: ¿por qué hay variedades sobre las que existe una base global de campos vectoriales y otras sobre las que no? Para responder a estas preguntas necesitamos estudiar lo que es un espacio vectorial sobre un cuerpo y lo que es un módulo sobre un anillo.
Un poco de álgebra
Comencemos por la estructura más general con las que vamos a trabajar: el anillo. Un anillo $(R,+,\cdot)$ es un sistema algebraico formado por un conjunto $R$ (del inglés ring) y dos operaciones cerradas, generalmente llamadas suma ($+$) y producto ($\cdot$), que cumplen las siguientes propiedades para cualesquiera $a,b,c\in R$:
(C) Conmutatividad para la suma: $a+b=b+a$.
(A) Asociatividad para la suma: $a+(b+c)=(a+b)+c$.
(N) Elemento neutro para la suma: $\exists 0\in R: 0+a=a$.
(I) Elemento inverso para la suma: $\exists (-a)\in R: a+(-a) = 0$.
Por tanto, $(R,+)$ tiene estructura de grupo abeliano. Para el producto:
(A) Asociatividad para el producto: $a\cdot b= b\cdot a$.
(D) Propiedad distributiva suma/producto: $a\cdot (b+c) = a\cdot b+a\cdot c$.
Si el anillo cuenta con un elemento neutro para el producto (N), que denotaremos mediante el símbolo $1\in R$, diremos que el anillo es unitario. Esto quiere decir que $\exists 1\in R:1\cdot a = a$. Si la operación de producto es conmutativa (C), es decir que $a\cdot b = b\cdot a$, se dice que el anillo es conmutativo. Finalmente, un anillo de división es un anillo unitario en el que todo elemento distinto de $0\in R$ posee un elemento inverso para el producto (I), es decir, $\forall a\neq 0 \exists a^{-1}\in R: a\cdot a^{-1} = 1$.
Para no perdernos en definiciones demasiado abstractas veamos un ejemplo concreto. Y es que un anillo es una estructura bastante natural en nuestro día a día. Por ejemplo, el conjunto de los enteros con las operaciones usuales de suma y de producto es un anillo conmutativo unitario. En efecto, la única propiedad que falla es la existencia de elemento inverso para el producto, ya que por ejemplo, el número 2, no tiene inverso en $\mathbb{Z}$. Para lo que sigue, es interesante comentar que el conjunto de funciones $C^{\infty}$ sobre la variedad $M$, que denotaremos por $C^{\infty}(M)$, es un anillo, pues existen funciones no nulas sobre la variedad que sí que pueden anularse en algunos puntos. En dichos puntos, por tanto, no está definida la función inversa (para el producto).
La siguiente estructura que necesitamos definir es la de cuerpo. Para ello podemos emplear la anterior definición de anillo, pues un cuerpo no es más que un anillo de división conmutativo, satisfaciendo las propiedades CANI (para la suma) y CANI D (para el producto). El conjunto de los reales con las operaciones usuales de suma y producto tiene estructura de cuerpo. En este caso, el número 2 sí que tiene inverso en $\mathbb{R}$, el 1/2.
 |
Resumen de las propiedades de los anillos y del cuerpo.
|
A partir de un anillo y de un cuerpo se pueden definir unas nuevas estructuras denominadas módulo y espacio vectorial, respectivamente. Comencemos esta vez por el segundo, el espacio vectorial.
Sea $K$ un cuerpo (del alemán, körper). Un $K$-espacio vectorial $(V,+,\cdot)$ es un conjunto $V$ equipado con unas operaciones cerradas de suma y de producto (no confundir con las del cuerpo) que satisfacen las siguientes propiedades para todos $a,b,c\in V$ y para todos $\alpha,\beta\in K$:
(C) Conmutatividad para la suma de vectores: $a+b=b+a$.
(A) Asociatividad de la suma: $(a+b)+c=a+(b+c)$.
(N) Elemento neutro en la suma: $\exists 0\in V: 0+a = a$.
(I) Elemento inverso para la suma: $\exists (-a)\in V: a+(-a)=0$.
(A) Asociatividad para el producto: $\alpha\cdot (\beta\cdot a) = (\alpha\cdot \beta)\cdot a$.
(D) Propiedad distributiva para el producto: $(\alpha+\beta)a=\alpha\cdot a+\alpha\cdot a$.
(D) Propiedad distributiva para la suma: $\alpha\cdot (a+b) = \alpha\cdot a+\alpha\cdot b$.
(U) Elemento neutro para el producto: $\exists 1\in K: 1\cdot a=a$.
Del mismo modo podemos definir el concepto de módulo. Sea $R$ un anillo. Diremos que $(M,+,\cdot)$ es un $R$-módulo si las operaciones de suma y de producto satisfacen CANI ADDU. Por tanto, un $R$-módulo es un campo vectorial definido sobre un anillo en vez de sobre un cuerpo.
Un ejemplo de campo vectorial (sobre el cuerpo de los reales) lo encontramos, como bien sabemos, en el plano real. Es quizá más interesante el ejemplo relativo al módulo. Como mencionamos anteriormente, podemos definir sobre cada punto de una variedad $M$ el denominado espacio tangente sobre $p\in M$, que se denota por $T_p M$. Si construimos la unión disjunta de todos los espacios tangentes a todos los puntos de la variedad, encontramos el fibrado tangente (tangent bundle) $TM$. En este caso, el fibrado consta de la terna $(TM,M,\pi)$, donde $\pi: E\to M$ es una proyección, es decir, que dado $X\in TM$, $\pi(X)=p$ siendo $p$ el punto de la variedad tal que $X\in T_pM$. En este contexto, un campo vectorial sobre $M$ es una sección del fibrado, es decir, una aplicación $\sigma: M\to TM$ tal que $\pi \circ \sigma = Id_M$. Al conjunto de campos vectoriales sobre $M$ lo llamaremos $\Gamma (TM)$. Pues bien, dado que $C^{\infty}(M)$ resultaba ser un anillo, $\Gamma (TM)$ es un $C^{\infty}(M)$-módulo. Por tanto, no es un espacio vectorial.
La cuestión ahora es que existe un teorema que garantiza que todo módulo sobre un anillo divisor admite una base. En particular, por tanto, todo espacio vectorial admite una base. Sin embargo, como ya hemos señalado, $C^{\infty}(M)$ no es un anillo divisor, y por tanto $\Gamma (TM)$ no siempre admitirá una base. Para probar este resultado necesitamos adentrarnos un poco en los axiomas de la Teoría de Conjuntos, pero antes de ello dejadme añadir que las variedades que admiten una base global de campos vectoriales (que como digo, no son todas) se denominan paralelizables. En ellas sucede que el fibrado tangente es trivial, es decir, que puede ser descompuesto en el producto cartesiano $TM \cong M\times \mathbb{R}^n$, siendo $n$ la dimensión de $M$. La idea es que si la variedad es paralelizable, la base global establece un isomorfismo natural entre $TM$ y $M\times \mathbb{R}^n$.
Para el caso del círculo se verifica que $TS^1\cong S^1\times \mathbb{R}$, es decir, que el fibrado tangente al círculo es isomorfo al cilindro. Sin embargo, como hemos visto, $TS^2$ no es isomorfo a $S^2\times \mathbb{R}^2$. Existe un resultado general que dice que $TS^n\cong S^n\times\mathbb{R}^n$ si y solo si $n$ es impar. Por tanto sí que es posible peinar esferas de dimensión impar.
Un poco de Teoría de Conjuntos
La Teoría de Conjuntos es el pilar fundamental sobre el cual se sustenta las Matemáticas modernas, y su campo de estudio son unos entes que se denominan... conjuntos. Fue desarrollada por G. Cantor y perfeccionada y sometida a un sistema axiomático por Russell, Zermelo, Fraenkel, entre otros. El sistema axiomático que detallaremos a continuación es el sistema de Zermelo-Fraenkel (ZFC) más el axioma de elección (axiom of Choice). El motivo de separar el axioma de elección del resto de axiomas es porque es independiente de ellos, y de hecho es posible formular una teoría de conjuntos sin necesidad de él. Sin embargo, existen varios resultados fundamentales en matemáticas que precisan del axioma de elección para ser ciertos. Uno de ellos, como no podía ser de otra manera, es la demostración de que todo módulo sobre un anillo divisor admite una base.
Los axiomas ZFC tratan de definir la idea de conjunto y de pertenencia ($\in$), además de las relaciones fundamentales entre ambos objetos. Sin entrar en mucha profundidad, los axiomas son los siguientes:
1. Axioma de $\in$. $x\in y$ es una proposición si y solo si $x$ e $y$ son conjuntos. Este axioma nos permite evitar paradojas como la de Russell. Vamos a verlo.
Supongamos que existe un conjunto $U$ que contiene a todos los conjuntos que no se contienen a sí mismos. Formalmente,
$\exists U:\forall z: (z\in U \Leftrightarrow z\notin z)$
Cabe preguntarse ahora si $U$ es un conjunto. Para ello estudiemos la proposición $U\in U$. Si ésta es cierta, entonces $U\notin U$, mas si ésta es falsa, entonces $U\notin U$ lo cual implica que $U\in U$. Por tanto, $U$ no es un conjunto, evitando así la paradoja de Russell.
2. Axioma del vacío. Existe un conjunto sin elementos: $\exists x: \forall y:y\notin x$. Es posible probar que este conjunto es único, por lo que recibe un nombre espacial: el conjunto vacío $\emptyset$.
3. Axioma de pares. Sean $x$ e $y$ dos conjuntos. Entonces existe un conjunto que contiene como elementos a $x$ e $y$.
$\forall x,y \ \exists m: \forall u:(u\in m\Leftrightarrow u=x \vee u=y)$
En particular, esto garantiza que si $x$ es un conjunto, existe el conjunto $\{x\}:= \{x,x\}$.
4. Axioma de la unión. Sea $x$ un conjunto. Existe un conjunto $\bigcup x$ cuyos elementos son los elementos de los elementos de $x$.
Sean $a,b$ conjuntos. Entonces existen los conjuntos $\{a\},\{b\}$ por el axioma de pares, y por tanto el conjunto $\{\{a\},\{b\}\}$. Entonces el axioma de unión garantiza que existe el conjunto $\{a,b\}$.
5. Axioma de reemplazo. Sea $R$ una relación tal que $\forall x \ \exists ! y: R(x,y)$ y $m$ un conjunto. Entonces la imagen de $m$ bajo $R$ es un conjunto. La imagen consiste en todos los $y$ tales que existe un $x\in m$ tal que $R(x,y)$. El axioma de remplazo implica el principle of restricted comprehension:
Sea $P$ un predicado de una variable y $m$ un conjunto. Entonces los $y\in m$ tales que $P(y)$ constituyen un conjunto. Éste se denota por
$\{y\in m | P(y)\}$
6. Axioma del conjunto potencia. Sea $m$ un conjunto. Entonces existe el conjunto potencia, denotado por $\mathcal{P}(m)$, formado por todos los subconjuntos de $m$.
7. Axioma del infinito. Existe un conjunto que contiene al vacío, y para cada uno de sus elementos $y$ contiene el elemento $\{y\}$. Uno de esos conjuntos podría ser el formado por los elementos $\emptyset, \{\emptyset\}, \{\{\emptyset\}\}, ...$ Si ahora denotamos $0\equiv \emptyset$, $1\equiv \{\emptyset\}$, $2\equiv \{\{\emptyset\}\}$ y así sucesivamente, nos encontramos ante el conjunto de los números naturales, cuya existencia está garantizada por este axioma.
8. Axioma de regularidad. Todo conjunto no vacío $x$ contiene un elemento $y$ que no contiene elementos en común con $x$. En particular, ningún conjunto se puede contener a sí mismo.
Con estos ocho axiomas tenemos el sistema axiomático ZF. Como adelantamos, existe un noveno axioma independiente de los demás: el axioma de elección.
9. Axioma de elección. Sea $x$ un conjunto cuyos elementos no son vacíos y son mutuamente disjuntos. Entonces existe un conjunto $y$ que contiene exactamente un elemento de cada elemento de $x$.
El axioma de elección es equivalente al Lema de Zorn:
"Un conjunto parcialmente ordenado $P$ tal que todos sus subconjuntos totalmente ordenados poseen una cota superior en $P$ contiene un elemento maximal"
Antes de explicar el contenido de este lema, es necesario añadir que Zermelo trató de probarlo a partir del resto de axiomas, pero los
Teoremas de Incompletitud de Gödel implican que el lema de Zorn no es demostrable a partir de los axiomas ZF. Por tanto se incorporó como noveno axioma. A continuación vamos a explicar el contenido del lema, cuya demostración a partir del axioma de elección podéis encontrar en el siguiente
enlace.
1. Un conjunto $(P,\le)$ es parcialmente ordenado si, para todos $a,b,c\in P$ se satisfacen las siguientes propiedades:
- Reflexividad: $a\le a$.
- Antisimetría: $(a\le b \wedge b\le a) \Rightarrow a=b$.
- Transitividad: $(a\le b \wedge b\le c) \Rightarrow a\le c$.
2. Un conjunto $(T,\le)$ es totalmente ordenado si, para todos $a,b,c\in P$ se satisfacen las propiedades de:
- Antisimetría: $(a\le b \wedge b\le a) \Rightarrow a=b$.
- Transitividad: $(a\le b \wedge b\le c) \Rightarrow a\le c$.
- Totalidad: $a\le b$ o $b\le a$.
La diferencia entre ambas definiciones radica, por tanto, en la reflexividad (que no es requerida para un conjunto totalmente ordenado, pero sí por el parcialmente ordenado) y la totalidad.
3. Cota superior: $u\in P$ es una cota superior de un subconjunto $T\subseteq P$ si para todo $t\in T: t\le u$.
4. Elemento maximal: $m$ es un elemento maximal de $P$ si no existe $x\in P$ tal que $m\le x$.
Muy bien, llega el momento de enunciar y demostrar el resultado clave de esta entrada, y es que todo módulo sobre un anillo de división admite una base. Recordemos que dado un $R$-módulo $V$, una base $B$ (en el sentido de Hamel) es un subconjunto $B\subseteq V$ tal que
(i) Todo subconjunto finito $\{b_1,...,b_N\}\subseteq B$ es linealmente independiente, es decir que $\lambda^i b_i = 0 \Rightarrow \lambda^i = 0 \ \forall i=1,...,N$.
(ii) Para todo $v\in V$ existen $v^1,...,v^M\in R$ y $b_1,...,b_M\in B$ tales que $v=v^ib_i$ (empleamos el convenio de sumación de Einstein).
Ahora sí, la demostración se organizará en cinco pasos:
(a) Sea $V$ un módulo sobre un anillo divisor $D$. Sea $S$ un sistema generador de $V$, es decir, que para todo $v\in V$ existan $e_1,...,e_N\in S$ y $v^1,...,v^N\in D$ tales que $v=v^a e_a$. Ciertamente $S$ existe, pues en el peor de los casos podemos tomar $S$ como el módulo entero. Nótese también que $S$ no constituye una base de $V$.
(b) Definimos un conjunto parcialmente ordenado, $(P,\le)$ mediante el conjunto
$P:=\{U\in \mathcal{P}(S) | U \ \text{es linealmente independiente}\}$
y la relación $\le\ \equiv\ \subseteq$. Entendemos que un conjunto es linealmente independiente si todo subconjunto finito de éste lo es. Ciertamente, por el axioma de reemplazo y el del conjunto potencia, $P$ es un conjunto y evidentemente la relación $\subseteq$ es parcial.
(c) Sea $T$ cualquier subconjunto totalmente ordenado de $P$. Entonces la unión $\bigcup T$ es una cota superior de $T$. Por el lema de Zorn, $P$ tiene entonces un elemento maximal $B$, que por construcción es el subconjunto de $S$ linealmente independiente más grande.
(d) El siguiente paso es probar que $B$ genera $S$. Sea $v\in S$. Dado que $B$ es maximal, $B\cup \{v\}$ es linealmente dependiente, por lo que existen $e_1,...,e_N\in B$ y $a^1,...,a^N\in D$, además de un $a\in D$, tales que $a^ie_i + av = 0$ donde $a\neq 0$ y no todos los $a^i$ son nulos. Es evidente que $a\neq 0$ porque $B$ es linealmente independiente. Como $D$ es divisor, existe $a^{-1}\in D$ tal que $a\cdot a^{-1}=1$. Por tanto $v=-a^{-1} a^i e_i$, lo cual prueba que $B$ genera $S$.
(e) Por último, dado que por hipótesis $V=span_D(S)$ y acabamos de ver que $S=span_D(B)$, entonces $V=span_D(B)$. Como $B$ es linealmente independiente y además genera $V$, $B$ es una base de $V$.
Como queríamos demostrar, todo módulo sobre un anillo de división admite una base. Nótese que el axioma de elección (escrito equivalentemente en términos del Lema de Zorn) ha jugado un papel determinante en esta demostración, así como el hecho de que $D$ sea un anillo de división.
Finalmente, el hecho de que el conjunto de funciones infinitamente diferenciables sobre la variedad, $C^{\infty}(M)$, no sea un anillo de división implica que no está garantizado que siempre exista una base global de campos vectoriales sobre una variedad. Si esto ocurre, como en el toro, la variedad es paralelizable y su fibrado tangente es trivial. Si no, como en las esferas de dimensión par, no es posible encontrar un campo vectorial que no se anule en algún punto. Y éste es el motivo por el cual no es posible peinar una esfera.
Conclusiones
En esta entrada hemos entendido de forma visual que existen superficies (o en general, variedades) que admiten un campo vectorial que no se anule en ningún punto y otras que no. Nos hemos referido a ellas como "que se pueden (o no) peinar". El hecho de que no esté garantizada la exisencia de una base global de campos vectoriales se debe a que el conjunto de campos sobre una variedad no tiene estructura de espacio vectorial, si no que es un módulo sobre un anillo no divisor. Con un poco de álgebra y algunas nociones sobre teoría de conjuntos, hemos demostrado por qué no está garantizada la existencia de dicha base.
Referencias
- Teorema de la bola de pelo
- Fibrado y fibrado tangente
- Variedad paralelizable
- Lema de Zorn
- Axiomas de la teoría de conjuntos
- Curso de Geometría Diferencial de Frederic Schuller
- Lectures on geometrical anatomy of theoretical physics de Frederic Schuller
- Cuerpo, anillo y módulo.